(Demo) A RHC strategy for constrained differential-drive robots PreCySe Group 0:50 2 years ago 21 Скачать Далее
(Paper Presentation) A RHC strategy for constrained differential-drive robots PreCySe Group 13:54 2 years ago 32 Скачать Далее
(Demo) A Receding Horizon Trajectory Tracking Strategy for Differential-Drive Robots PreCySe Group 1:28 2 years ago 205 Скачать Далее
NFOMP: Neural Field for Optimal Motion Planner of Differential-drive Robots Nonholonomic Constraints Dzmitry Tsetserukou 6:51 1 year ago 297 Скачать Далее
(Paper Presentation) A Detection Strategy for Setpoint Attacks Against Differential-Drive Robots PreCySe Group 10:10 2 years ago 47 Скачать Далее
Detailed and Correct Derivation of Kinematics Equations of Differential Drive Mobile Robot Aleksandar Haber 16:28 9 months ago 5 789 Скачать Далее
Kinematics of Differential Drive Robots and Odometry Engineering Educator Academy 50:55 3 years ago 28 464 Скачать Далее
Equations of Motion for Differential Drive Robots Engineering Educator Academy 57:54 2 years ago 8 588 Скачать Далее
Modern Robotics, Chapter 13.3.1: Modeling of Nonholonomic Wheeled Mobile Robots Northwestern Robotics 5:01 6 years ago 40 146 Скачать Далее
A* Implementation on a Non holonomic Differential drive robot Pradeep G 0:26 4 years ago 124 Скачать Далее
Holonomic vs. Nonholonomic Constraints for Robots | Fundamentals of Robotics | Lesson 4 Mecharithm - Robotics and Mechatronics 12:48 3 years ago 18 417 Скачать Далее
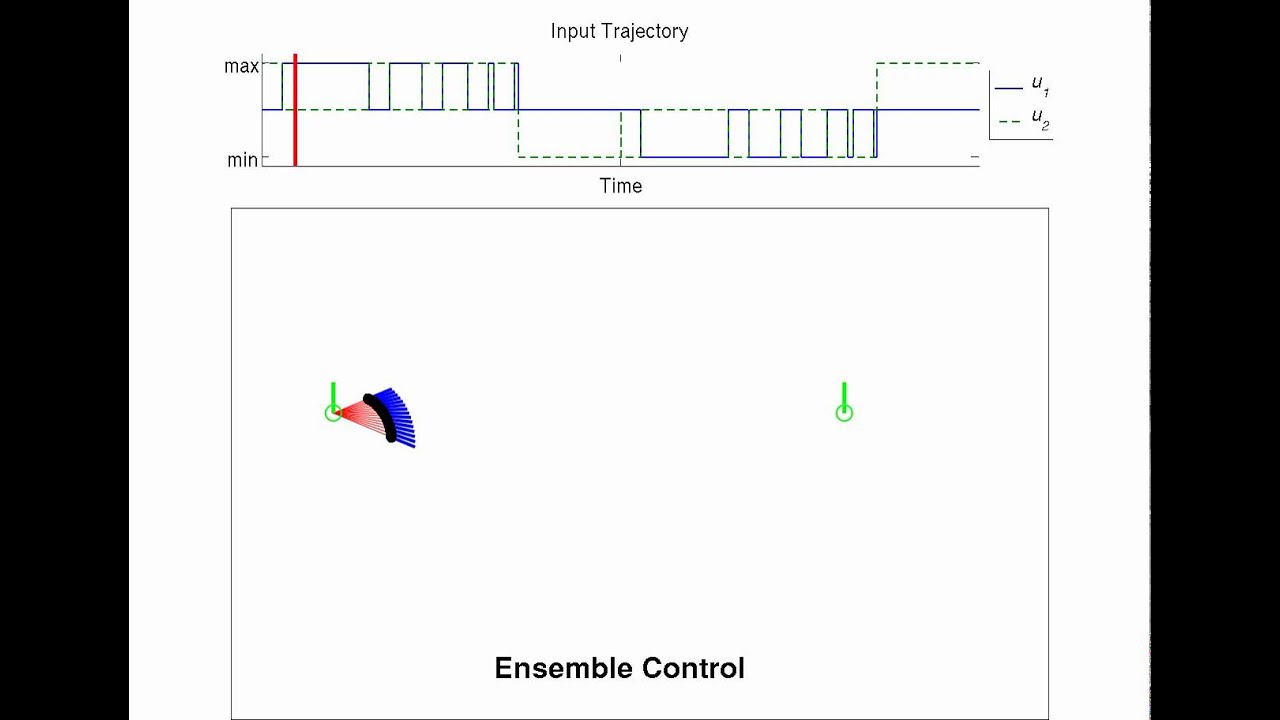
Range and Bearing Control of Many Differential-Drive Robots with Uniform Control Inputs Aaron Becker 1:33 11 years ago 6 565 Скачать Далее
Control of Mobile Robots- 2.2 Differential Drive Robots mouhknowsbest 8:13 11 years ago 109 005 Скачать Далее
Control of Differential Drive Robots for Path Traversal Engineering Educator Academy 54:29 2 years ago 5 254 Скачать Далее
Path planning with RRT* for an autonomous differential drive robot Samuel Nyffenegger 1:52 6 years ago 714 Скачать Далее